2022
2022-11-09
경가반 중량 피킹 로봇용「로터리 액츄에이터식 핸드」를 개발
첨부파일
첨부파일이 없습니다.
놓치지 않고 낙하시키지 않는 정밀 핸드로 제조 현장의 생산성 향상에 공헌
NTN 주식회사(이하, NTN)는, 경가반 중량(5kg이하)의 피킹 로봇 전용으로, 소형·경량으로, 0~100°의 범위에서 설정한 임의의 2점의 각도로 자세 변경이 가능한 「로터리 액추에이터식 핸드」를 개발했습니다. 피킹 로봇의 선단부에 장착하여 무작위의 자세의 대상 부품(이하 워크)에 대해 다양한 방향·각도에서의 피킹이 가능합니다. 워크의 놓침이나 반송시의 낙하를 방지함으로써 반송이나 정렬에 있어서의 생산성 향상에 공헌합니다.
피킹 작업에는 일반적으로 고속으로 강도가 높은 수평 다관절 로봇(이하 스칼라 로봇)이 사용되고 있습니다. 스칼라 로봇은 워크에 대해 횡 방향이나 경사진 방향에서의 피킹이 불가능하고 위쪽에서의 피킹만 한정되기 때문에 피킹 가능한 자세의 워크가 될 때까지 대기하는 경우가 있었습니다. 또한 로봇의 선단에 장착하는 핸드는 일반적으로 중량이 크고 가반 중량이 큰 로봇이 필요해 로봇의 동작속도가 느려지거나 주변장치와의 간섭을 회피하기 위해 장치 전체가 대형화되는 것도 과제가 되었습니다.
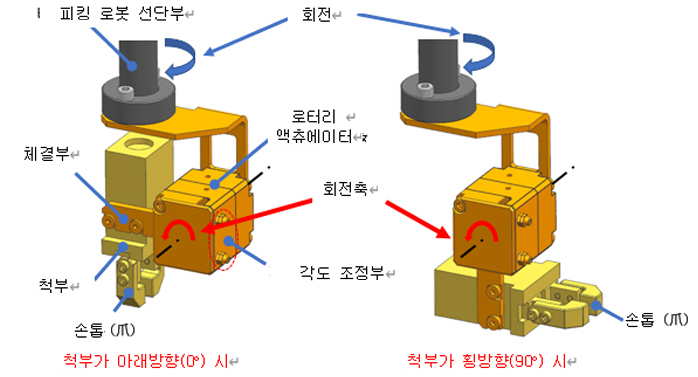
NTN이 이번에 개발한 「로터리 액츄에이터식 핸드」는 로터리 액츄에이터의 회전축을 중심으로 워크를 잡는 척부와의 체결부가 회전하는 것으로 척부의 위치나 자세를 0~100° 범위에서 설정한 2점 각도로 변경하는 것이 가능합니다. 피킹 로봇의 선단부에서 본 개발품을 회전시킴으로써, 횡 방향이나 경사진 방향으로부터의 피킹이 가능해져, 워크의 놓침을 대폭 삭감합니다. 로터리 액츄에이터, 척부를 컴팩트하게 일체화 함으로써 소형·경량화를 도모하는 동시에 주변 장치의 간섭도 방지하고 있습니다. 또한 척부의 손톱 형상을 최적화하여 워크의 낙하도 방지합니다.
스칼라 로봇을 이용한 피킹 로봇과 본 개발품을 조합하는 것으로, 기존에는 곤란하다고 여겨졌던 무작위한 자세의 워크를 고속으로 피킹하는 것이 가능해져, 생산성의 향상에 공헌하고 있습니다. 또한 피킹 후 반송 중에 워크의 자세를 변경하는 것도 가능하기 때문에 워크 자세를 정돈하는 기구나 공정을 생략할 수 있어 반송 라인의 컴팩트화에도 공헌합니다.
NTN은 중기 경영 계획 「DRIVE NTN100」Phase 2에서, 새로운 영역인 「로봇 주변 모듈」분야의 강화에 임하고 있습니다. 본 개발품을 포함하여 지금까지 길러 온 정밀 가공 및 위치 결정 기술을 응용한 제품의 개발 및 제공을 통해 제조 현장의 자동화 및 효율화에 기여하고 로봇 시장의 발전에 더욱 기여하겠습니다.
특징
|
1. 임의의 자세로 워크를 파악 가능 |
워크의 자세에 맞추어 위 또는 옆에서 잡는 것이 가능 |
|
2. 워크 자세는 0 ° ~ 100 °의 임의의 두 각도로 변경할 수 있습니다. |
피킹 후 워크 자세를 로봇에 의한 반송 중에 변경하는 것이 가능하며 자세 변경을 실시하는 기구나 공정 생략 |
|
3. 소형・경량 |
로터리 액츄에이터와 척부를 컴팩트하게 일체화하고 있어 로봇 선단부의 중량·관성이 작아져 고속 반송이 가능 |
용도 전개
운송, 조립
제품 사진

참고 사양
※ 향후 변경될 수도 있습니다.
|
사이즈* (아래 방향 시) |
W73mm × H112mm × D54mm |
|
중량* |
0.35 kg |
|
발생 토크 (0.4MPa, 공기) |
0.6 Nm |
|
최대 가반 중량 (0.4MPa, 공기) |
0.1 kg |
|
동작 회전 속도 (0.4MPa, 공기, 무부하 시) |
50min-1 (0.3s/90°) |
|
작동 가능 범위 |
0 ° ~ 100 ° |
* 장착 부재, 평행 척 및 손톱 포함
자세 변경 이미지
피킹 로봇용 피더 「TRINITTE*1(트리니테)」와의 연계
NTN이 개발한 피킹 로봇용 피더 「TRINITTE(트리니테)」는 기존 파츠 피더에 회전원반과 인코더를 조합한 피킹 로봇용 부품공급기로 카메라에 의한 화상 처리 신호를 피킹 로봇에 접목하고 원호 컨베이어 트래킹 기술*2를 활용하여 안정된 부품의 연속 피킹을 실현하고 있습니다.
이번에 개발한 「로터리 액츄에이터식 핸드」는, 「TRINITTE」와 조합하는 것으로, 워크의 놓침을 방지하고, 「TRINITTE」의 폭넓은 워크 형상에 대응한 연속 피킹이나, 교체 시간의 단일화[igy1] 나 워크 막힘의 삭감 등의 특징과 합쳐져 높은 생산성을 발휘합니다.
*1) 2021년 9월 29일 프레스 릴리즈:
피킹 로봇용 「TRINITTE(트리니테)」를 개발
https://www.ntn.co.jp/japan/news/new_products/news202100063.html
*2) 원호 컨베이어 트래킹 기술: 원호 궤적에서 원호 궤도 위의 워크를 따라가서 이동
중인 워크를 잡는 기술
참고
<어플리케이션 예 1> 무작위한 자세로 공작물 피킹(「TRINITTE」와 연계)
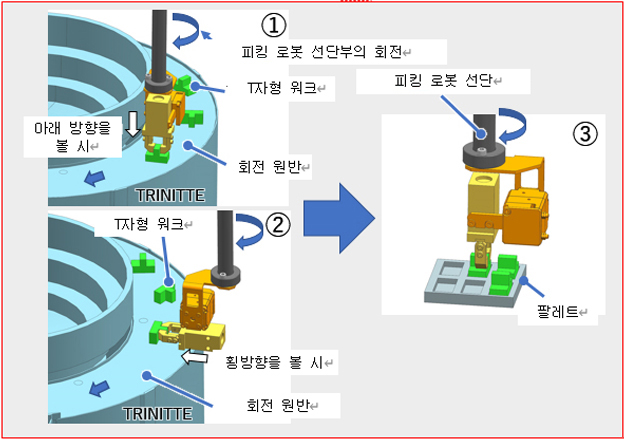
・TRINITTE의 회전 원반 위에 T자형 워크가 무작위의 자세로 이동된다.
・피킹 로봇이 카메라 영상과 회전 원반의 속도로 피킹 위치를 연산하여 워크를 트래킹(추적)
① T자형 워크의 볼록부가 위쪽을 바라보고 이동되는 경우
로터리 액츄에이터식 핸드가 아래 방향으로 자세 변경하고 동시에 피킹 로봇 선단부가 회
전하여 워크 바로 위에서 피킹을 실시한다.
②
T자형 워크의 볼록부가 옆을 바라보고 이동되는 경우
로터리 액츄에이터식 핸드가 로터리 액츄에이터의 회전축으로 회전하여 횡방향으로 자세를 변경. 동시에
피킹 로봇 선단부가 회전하여 워크 바로 옆에서 피킹을 실시한다.
③
팔레트에 배치할 경우
로터리 액츄에이터식 핸드가 ①인 자세일 때는 그대로의 자세로 피킹 로봇 선단부가 회전하여 워크를 팔레트의 방향에
맞게 배치한다.
로터리 액츄에이터식 핸드가 ②인 자세일 때는 로터리 액츄에이터의 회전축이 회전하여 척부가 아래 방향으로 자세 변경. 피킹 로봇 선단부가 회전하여 워크를 팔레트에 배치한다.
<어플리케이션 예2> 반송 시의 워크 자세 변경(「TRINITTE」와 연계)

・TRINITTE의 회전 원반 위에
무작위한 자세로 워크가 이동된다.
・피킹 로봇이 카메라 영상과 회전 원반의 속도로 피킹 위치를 연산하여 워크를 트래킹(추적)
① 로터리 액츄에이터식 핸드는 아래 방향으로 자세를 변경하고, 동시에 피킹 로봇 선단부가 회전하여 바로 위에서 피킹을 실시한다.
② 워크를 파악한 후 로터리 액츄에이터식 핸드는 반송 중에 횡방향으로 자세를 변경하고 배치 위치로 이동 후 로봇이 하강하여 워크를 세워 팔레트에 배치한다.


